Sensor-Based Navigation(以下:SBN)。自律移動ロボットのナビゲーションシステムとしての広義的な分類の一つ。
SBNでは、一般的に移動ロボットには行動範囲内の情報が一切(or 部分的にしか)与えられておらず、それを外界センサ(ビジョンセンサや超音波センサなど)を用いて移動を繰り返しながら局所的に獲得し、目的とする地点(以下:goal)まで移動をさせるナビゲーションシステム。
モデルベーストナビゲーションとは異なり、自己位置・姿勢誤差が少々乗っても障害物を回避して移動する事が可能であるが、障害物回避を試行錯誤的に行う事が必然であり、goalに到達した時の移動経路が必ずしも最適解であるとは限らず、システムや障害物の配置によってはデッドロックに陥る可能性もある事が欠点である。
SBNでは、ロボットは以下の行動を必要に応じて繰り返してgoalへと移動する。「goalへ向かって移動」する "Move"。「障害物と衝突し(正確には衝突の直前)、"Move" から "Wall tracking"に移行」する "Collision"。「障害物に沿って移動」する "Wall tracking"。「障害物から離脱し、"Wall tracking" から "Move" に移行」する "Taking off"。この四動作である
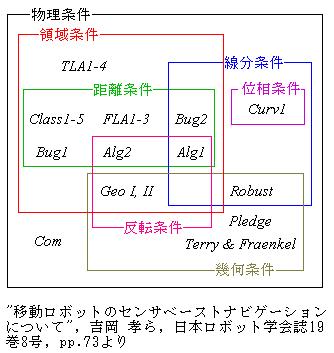
古くはComに始まり、Class, Bug, Alg, Pledge, Robust, Geo, Curvなどの古典的障害物回避SBNが知られている。近年では、更に進んだ研究も数多くなされています。
因みに私は大学院では、障害物回避では無く地形要素センシングを用いた、ロボットにとっての走行難易度の観点から見た経路生成を行なうSBNの研究を行なっていました。