 ※Bug1
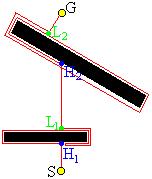
※Bug1ロボットは先ず、GOAL(G点)へ向かってSTART(S点)から "Move" する。そして、障害物(右図中の黒地)に "Collision" した所(図中Hi点)で "Wall tracking" へと移行する。ロボットは "Wall tracking" して障害物を一周しながら、障害物からG点への最近傍地点 Li点 を探索しする。そして、Hi点に到着した時点=障害物を一周した時点でロボットは時計回りか反時計回りで(より移動距離が短い方のルートを選択)Li点へと壁伝いに移動して "Taking off" し、再度 "Move" へ移行(以上、右図参照)。この手順を必要回だけ繰り返し、ロボットはG点へと向かう。
このシステムではデッドロックには陥らず必ずG点へと到達出来るが、障害物を必ず一周する為、G点へ最短ルートで移動する事が不可能であると言う欠点がある。
※Bug 2
アルゴリズムBug1に "線分条件" を付加したシステム。
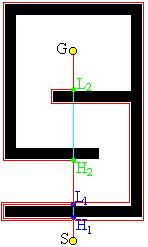
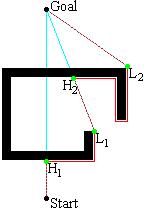
ロボットは先ず、GOAL(G点)へ向かってSTART(S点)から "Move" を行なう。そして、障害物(右図中の黒地)に "Collision" した所(図中 Hi点)で "Wall tracking" へと移行する。ロボットは "Wall tracking" して障害物を壁伝いに周り込みながら、S点からG点へ向かう線分(線分SG)との合流地点を探す。そしてその合流地点をC点とする時、『線分HiG > 線分CG』と成る点Cを以って "Taking off" 点Liとする。そしてそのLiから再度 "Move" へ移行し、ロボットはG点へと向かって移動を繰り返す。
このシステムはBug1と同じくデッドロック現象が生じない。また、Bug1程、移動に無駄が無い為、広く使用されるSBNでもある。但し、それでもロボットの移動が最短である可能性は極めて低いと言う欠点は残り、図中のH2からL2へ向かうようなケースの場合に到っては、Bug1よりも無駄距離を移動する可能性もある。
 SBNとしては最も基礎的なナビゲーションシステム。ロボットは自分の位置・姿勢情報と目標位置情報だけを有してGOALへと向かうシステム。システムの拘束条件は、障害物の有無だけと言う単純な物理条件(Physical condition)だけである。
SBNとしては最も基礎的なナビゲーションシステム。ロボットは自分の位置・姿勢情報と目標位置情報だけを有してGOALへと向かうシステム。システムの拘束条件は、障害物の有無だけと言う単純な物理条件(Physical condition)だけである。